Radiometric Calibration from a Single ImageStephen Lin, Jinwei Gu, Shuntaro Yamazaki and Harry ShumAbstractPhotometric methods in computer vision and graphics require calibration of the camera's radiometric response. Previous works have addressed this problem using multiple registered images captured under different camera exposure settings. In many instances, such an image set is not available. We propose a method that performs radiometric calibration from only a single image, based on measured RGB distributions at color edges. This technique automatically selects appropriate edge information for processing, and employs a Bayesian approach to compute the calibration. The optimal response curves are selected by minimizing the nonlinearity (i.e., the sum of the distances of the pixels on the edge patches to the straight line in RGB space) and maximizing the probability in the prior space. Experiments have shown that accurate calibration results can be obtained using only a single input image, when the input images has enough edge pixels that cover a large range of the intensity spectrum.PublicationStephen Lin, Jinwei Gu, Shuntaro Yamazaki, and Heung-Yeung Shum. "Radiometric Calibration from a Single Image". in Proc. of IEEE Conference on Computer Vision and Pattern Recognition (CVPR2004), vol.2, pp.938-945, 2004.Basic Idea1. The image irradiances of the edge pixels are linear combinations of the two image irradiance values of the two regions. After sensored by the camera, the linearity will no longer be preserved because of the nonlinear camera response.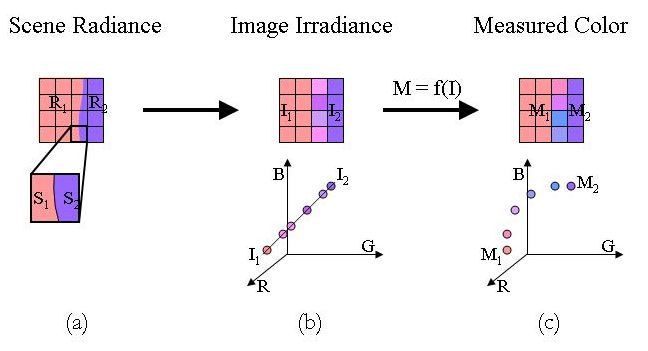 2. This fact can be used to solve for the inverse response function g that can best recover the linearity on the edge pixels, which only requires one single image as the input.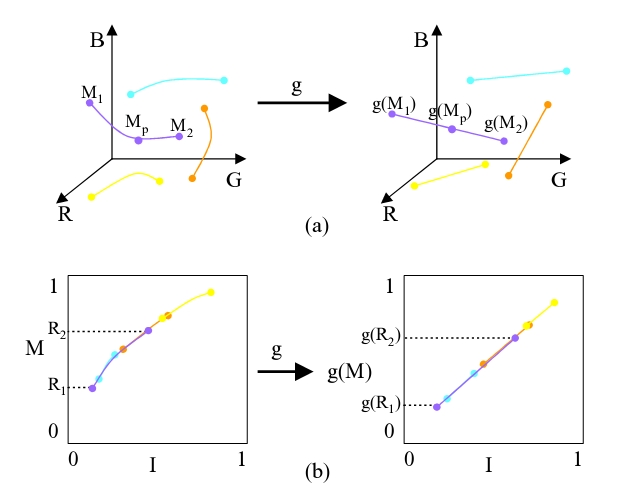 DownloadSeveral of the image sets we used in our experiments can be downloaded here. The aperture to take these images is F8, the shutter speeds are: 1/30, 1/15, 1/8, 1/4, 1/2 (stops). The estimation results of camera response for the duck example can be found here.
Related WorkStephen Lin and Lei Zhang, "Determining the Radiometric Response Function from a Single Grayscale Image", IEEE Conference on Computer Vision and Pattern Recognition 2005. |